The use of feedback control strategies is one of the most common ways to control a process, but it is important to consider that feedback control is an error-driven strategy; correction to any upset in the process we want to control depends on the error or difference between the desired value of the “controlled” variable and its current value.
By the other hand, the feedforward control strategies use the knowledge of the process behavior to take action before a perturbation to the process has any effect on the controlled variable.
Several methods has been discussed to implement a feedforward control strategy, one of them is explained by Soundar Ramchamdram (1). He uses steady-state models of the process to determinate the value that the manipulated variable should has to compensate the effect of perturbations on the controlled variable. He successfully demonstrated that Process-Model-Based control was appropriate to control the trays temperature in a typical wastewater column.
A simple example.
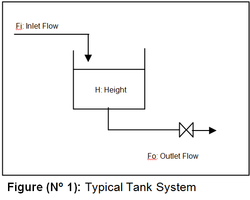
To give an example of the advantage that a feedforward strategy can have over a pure feedback control, let’s have a look on a very simple system; consider a tank were we want to control the level, as shown in figure (No 1). This is a typical first order system.
By the other hand, the feedforward control strategies use the knowledge of the process behavior to take action before a perturbation to the process has any effect on the controlled variable.
Several methods has been discussed to implement a feedforward control strategy, one of them is explained by Soundar Ramchamdram (1). He uses steady-state models of the process to determinate the value that the manipulated variable should has to compensate the effect of perturbations on the controlled variable. He successfully demonstrated that Process-Model-Based control was appropriate to control the trays temperature in a typical wastewater column.
A simple example.
To give an example of the advantage that a feedforward strategy can have over a pure feedback control, let’s have a look on a very simple system; consider a tank were we want to control the level, as shown in figure (No 1). This is a typical first order system.
We would like to keep the level of the tank under control. The Feed flow can vary and the Outlet flow will be manipulated through a control valve.
Modeling the Process.
To simulate the process, MATLAB 5.1 can be used. This requires the process equations and the transfer function of the process representation in a block diagram.
The equations that describe this process are as follows:
Fi = Fo + A(dH/dt) (1)
Where, Fi is the inlet flow, Fo is the outlet flow, A is the transversal area of the thank and H is the height of liquid in the tank.
It is assumed that at the initial stead-state the process parameters are: H=2m, A=5m2 , Fi and Fo are 0.2m3/seg.
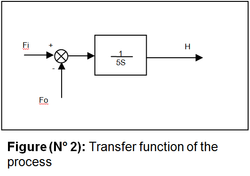
Laplace can be applied to find the transfer functions of the process.
Fi(S) = Fo(S) +ASH(S) (2)
H(S) = (Fi(S) – Fo(S)) / (A S). (3)
The figure (No 2) shows the resulting transfer function for the tank system. Using SIMULINK of MATLAB 5.1 this process can be dynamically simulated to study the effect of perturbations in the inlet flow on the tank level.
Modeling the Process.
To simulate the process, MATLAB 5.1 can be used. This requires the process equations and the transfer function of the process representation in a block diagram.
The equations that describe this process are as follows:
Fi = Fo + A(dH/dt) (1)
Where, Fi is the inlet flow, Fo is the outlet flow, A is the transversal area of the thank and H is the height of liquid in the tank.
It is assumed that at the initial stead-state the process parameters are: H=2m, A=5m2 , Fi and Fo are 0.2m3/seg.
Laplace can be applied to find the transfer functions of the process.
Fi(S) = Fo(S) +ASH(S) (2)
H(S) = (Fi(S) – Fo(S)) / (A S). (3)
The figure (No 2) shows the resulting transfer function for the tank system. Using SIMULINK of MATLAB 5.1 this process can be dynamically simulated to study the effect of perturbations in the inlet flow on the tank level.
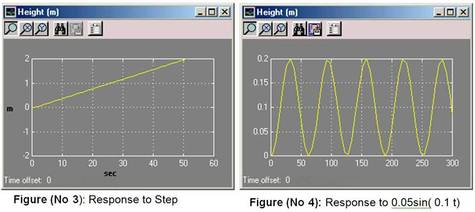
The figures (No 3) and (No 4) show the response to a step and to a sinusoidal function as perturbation to the inlet flow respectably. Note that graphics show variation from initial steady-state in meters.
The sinusoidal function applied on the inlet flow had amplitude of 0.05m3/sec and a frequency of 0.1.
The sinusoidal function applied on the inlet flow had amplitude of 0.05m3/sec and a frequency of 0.1.
Controlling the system with a feedback strategy
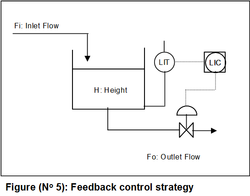
As discussed above, feedback control is the most common strategy used to control a desired variable. So, this kind of strategy was tested on the modeled system. The controlled variable is the tank level and the manipulated variable is the outlet flow handled through the control valve.
The control strategy used can be observed in the figure (No 5)
As discussed above, feedback control is the most common strategy used to control a desired variable. So, this kind of strategy was tested on the modeled system. The controlled variable is the tank level and the manipulated variable is the outlet flow handled through the control valve.
The control strategy used can be observed in the figure (No 5)
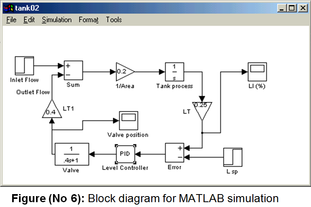
This control strategy was tested with two different kind of perturbation on the inlet flow. The figure (No 6) shows the block diagram used to simulate the control strategy. Note that the control valve has a transfer function like a first order process. This is to have a better approximation to what really happens with the valve positioning in response to a signal from the level controller.
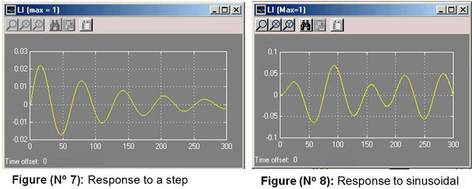
The strategy was exposed to a change in inlet flow of 0.05m3/seg. The response to this perturbation can be seen in the figure (No 7).
The maximum overshot obtained was about 2% in the level. The gain and the integral time used for the PID were 0.5 and 0.2 respectively. This set of tuning parameters can be improved, but they will not be adequate for the next perturbation that this strategy was tested against lately.
The strategy was then tested with a sinusoidal inlet flow. It can be observed in the figure (No 8) that the strategy can not control properly this perturbation.
The level kept fluctuating around the set-point; the amount of the fluctuation was about ±5%.
Other tests were carried out such as changes in the level set-point and the combination of changes in the set-point and the introduction of perturbations in the inlet flow.
The maximum overshot obtained was about 2% in the level. The gain and the integral time used for the PID were 0.5 and 0.2 respectively. This set of tuning parameters can be improved, but they will not be adequate for the next perturbation that this strategy was tested against lately.
The strategy was then tested with a sinusoidal inlet flow. It can be observed in the figure (No 8) that the strategy can not control properly this perturbation.
The level kept fluctuating around the set-point; the amount of the fluctuation was about ±5%.
Other tests were carried out such as changes in the level set-point and the combination of changes in the set-point and the introduction of perturbations in the inlet flow.
Improving with a Feedforward strategy.
A feedforward strategy was designed to evaluate its performance under the same perturbations that the feedback strategy was exposed.
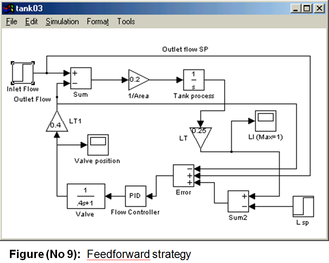
The process diagram of the strategy can be seen in the figure (No 9)
A feedforward strategy was designed to evaluate its performance under the same perturbations that the feedback strategy was exposed.
The process diagram of the strategy can be seen in the figure (No 9)
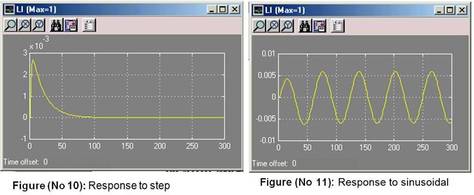
The results obtained with the feed-forward control strategy are better than the obtained with the feedback strategy. In the figures (No 10) and (No 11), can be observed the response of the system to two kinds of perturbation; one step and one sinusoidal function respectively.
Basically in this strategy two errors are controlled at once; the error between the measured outlet flow and its set-point, and the error between the current level and its set-point.
The steady-state of this system tells that the inlet flow to the tank must be equal to the outlet flow from the tank. For this reason the inlet flow is send as set-point to the outlet flow controller to take action in advance, before the level is actually perturbed by the inlet flow upset.
Any error in the level will be corrected by the same outlet flow controlled since the error between the current level and its set-point is added to the error discussed above.
In the figure (No 10), can be observed that the maximum overshot obtained is less than 0.3% significantly less than the 2% obtained with the feedback strategy.
In the figure (No 11) it is shown that the level will be oscillating around the set-point about ±0.5% which is less than the 5% resulting in the feedback strategy.
What is against.
“Nothing is better for nothing”; Having a better strategy should involve some extra cost. In this case the installation of flow instruments at the inlet and outlet of the tank involve some extra costs. How important is to keep the controlled variable with a permissible error is the key question to evaluate if the extra cost involved in a better strategy is profitable.
In the real life.
This designed strategy can be implemented in a real application such as bottom of a distillation column, where the inlet flow will be proportional to the column feed flow. In most of the cases of distillation columns the feed and bottom flows are measured, so this strategy will not represent an extra cost.
Another implementation could be in boilers and evaporators, where a steady level of condensate is very important.
It will be very interesting to evaluate the performance of the discussed strategy in processes with delays or a higher order.
Conclusion
Feedforward control strategies have a better performance than pure feedback control strategies when implemented on processes of first order, but this improvement can involve some extra costs. The balance between the profitability of a better strategy and the importance of having a very steady controlled variable, is the key point to choose or design the control strategy.
Literature:
1. Soundar Ramchandran, “Consider Steady-State Models for Process Control”, Chemical Engineering Progress, Feb-1998, pp 75 – 81.
2. Katsuhiko Ogata, “Ingenieria de Control Moderna”. 3rd Edition, 1997, pp 9 – 40
3. S. Majhi; D.P. Atherton, “Online tuning of controllers for and unstable FOPDT process”, IEE Proc.-Control Theory Appl., Vol 147 No 4, July 2000, pp. 421 – 427.
The steady-state of this system tells that the inlet flow to the tank must be equal to the outlet flow from the tank. For this reason the inlet flow is send as set-point to the outlet flow controller to take action in advance, before the level is actually perturbed by the inlet flow upset.
Any error in the level will be corrected by the same outlet flow controlled since the error between the current level and its set-point is added to the error discussed above.
In the figure (No 10), can be observed that the maximum overshot obtained is less than 0.3% significantly less than the 2% obtained with the feedback strategy.
In the figure (No 11) it is shown that the level will be oscillating around the set-point about ±0.5% which is less than the 5% resulting in the feedback strategy.
What is against.
“Nothing is better for nothing”; Having a better strategy should involve some extra cost. In this case the installation of flow instruments at the inlet and outlet of the tank involve some extra costs. How important is to keep the controlled variable with a permissible error is the key question to evaluate if the extra cost involved in a better strategy is profitable.
In the real life.
This designed strategy can be implemented in a real application such as bottom of a distillation column, where the inlet flow will be proportional to the column feed flow. In most of the cases of distillation columns the feed and bottom flows are measured, so this strategy will not represent an extra cost.
Another implementation could be in boilers and evaporators, where a steady level of condensate is very important.
It will be very interesting to evaluate the performance of the discussed strategy in processes with delays or a higher order.
Conclusion
Feedforward control strategies have a better performance than pure feedback control strategies when implemented on processes of first order, but this improvement can involve some extra costs. The balance between the profitability of a better strategy and the importance of having a very steady controlled variable, is the key point to choose or design the control strategy.
Literature:
1. Soundar Ramchandran, “Consider Steady-State Models for Process Control”, Chemical Engineering Progress, Feb-1998, pp 75 – 81.
2. Katsuhiko Ogata, “Ingenieria de Control Moderna”. 3rd Edition, 1997, pp 9 – 40
3. S. Majhi; D.P. Atherton, “Online tuning of controllers for and unstable FOPDT process”, IEE Proc.-Control Theory Appl., Vol 147 No 4, July 2000, pp. 421 – 427.
 RSS Feed
RSS Feed
{kind=link}